Un sensor óptico para robots quirúrgicos del tamaño de un grano de arroz podría cambiar la forma en que los instrumentos robóticos interactúan con el cuerpo humano. Investigadores de la Universidad Jiao Tong de Shanghái han publicado en la revista Optica los resultados de un dispositivo de apenas 1,7 milímetros de ancho que mide fuerzas y torsiones en todas las direcciones usando únicamente luz, sin necesidad de electrónica convencional.
El líder del equipo, Jianlong Yang, lo resume con «aunque los sistemas de imagen modernos pueden mostrar estructuras con nitidez, no ofrecen información sobre la interacción física, como la fuerza o el par, y los sensores de fuerza existentes suelen ser demasiado voluminosos o complejos para caber en herramientas en miniatura».
Cómo funciona el sensor óptico para robots quirúrgicos
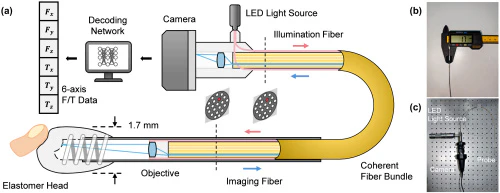
El principio de funcionamiento es elegante en su sencillez. En la punta de una fibra óptica hay un pequeño material elástico que se deforma ligeramente al entrar en contacto con cualquier superficie. Esa deformación altera el patrón de luz que viaja por el interior del sensor. La señal modificada recorre un haz de fibras coherentes hasta una cámara, que la captura como si fuera una imagen. Un modelo de aprendizaje automático analiza después esos patrones y los traduce en lecturas precisas de fuerza y torsión en los seis ejes posibles.
Lo que distingue este diseño de otros sensores miniaturizados, como los sistemas de redes de Bragg en fibra (FBG), es que todo el proceso ocurre a través de un único canal óptico. No hace falta distribuir varios elementos sensores por el dispositivo ni tender un cableado complejo. El sensor «no mide la fuerza componente a componente, sino que capta el estado de contacto global en un solo paso», según Yang. Eso reduce los puntos de fallo y facilita fabricarlo a un tamaño que cabe dentro de los instrumentos quirúrgicos más avanzados.
La prueba del tumor oculto
Durante las pruebas, el equipo colocó el sensor sobre un bloque de gelatina blanda con una pequeña esfera rígida escondida en su interior, simulando un tumor dentro de tejido humano. El dispositivo detectó el objeto oculto al percibir diferencias de rigidez mientras se desplazaba por la superficie. Es exactamente el tipo de retroalimentación táctil que falta en la cirugía mínimamente invasiva actual: un cirujano puede ver el área con claridad en una pantalla, pero distinguir tejido sano de tejido problemático sigue dependiendo en gran medida de la intuición y la experiencia, no de señales del propio instrumento.
Esa carencia tiene consecuencias reales. Sin retroalimentación de fuerza, los robots quirúrgicos pueden aplicar presión excesiva sin que el cirujano lo perciba, con el riesgo de dañar tejidos delicados. Un sensor capaz de detectar contacto inseguro y ajustar la acción en tiempo real, sobre todo en entornos tan reducidos como el interior de un ojo o una articulación, abre posibilidades que la imagen sola no puede ofrecer.
Queda camino antes de llegar al quirófano
Los propios investigadores reconocen que los resultados actuales son una prueba de concepto, no un producto terminado. Fabricar sensores de este tamaño con calidad uniforme a escala industrial es mucho más difícil que producir un prototipo en laboratorio. El proceso de calibración también necesita volverse más sencillo y fiable, y el dispositivo aún no ha pasado las pruebas de resistencia a largo plazo que exigen los reguladores para equipos médicos.
Aun así, la arquitectura tiene un atractivo. Al apoyarse en un único canal óptico y una cámara, el diseño es más fácil de mejorar y escalar que los sistemas que combinan múltiples componentes. El equipo trabaja ahora en integrar el sensor en herramientas robóticas reales y probarlo en entornos más cercanos a un quirófano. Si los resultados se sostienen, un dispositivo del tamaño de un grano de arroz podría acabar siendo una pieza indispensable en la nueva generación de robots quirúrgicos inteligentes.